노이즈 필터
센서 측정과 노이즈
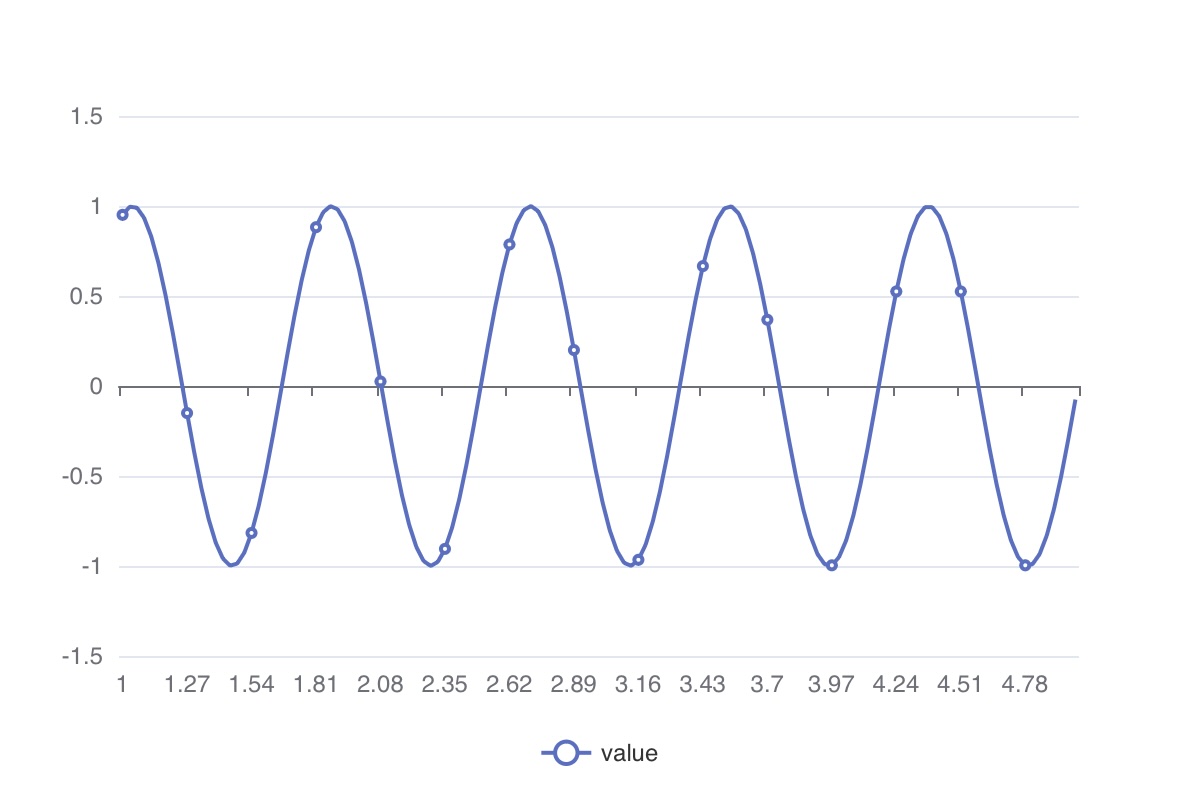
IoT 환경에서 수집되는 값은 모두 센서를 통해 측정된 데이터입니다. 모든 센서는 필연적으로 일정 수준의 노이즈(잡음)를 포함하며, 이론적으로 완전히 깨끗한 데이터는 수학적으로 생성한 가상 데이터일 뿐입니다. 아래 예제는 노이즈가 없는 순수한 신호를 표현합니다.
SCRIPT({
$.result = { columns: ["val", "sig"], types: ["double", "double"] }
for (i = 1.0; i <= 5.0; i+=0.03) {
val = Math.round(i*100)/100;
sig = Math.sin( 1.2*2*Math.PI*val );
$.yield( val, sig );
}
})
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value" },
],
legend: { bottom: 10 },
})
)FAKE(arrange(1,5,0.03))
MAPVALUE(0, round(value(0)*100)/100)
SET(sig, sin(1.2 * 2 * PI * value(0)) )
MAPVALUE(1, $sig)
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value" },
],
legend: { bottom: 10 },
})
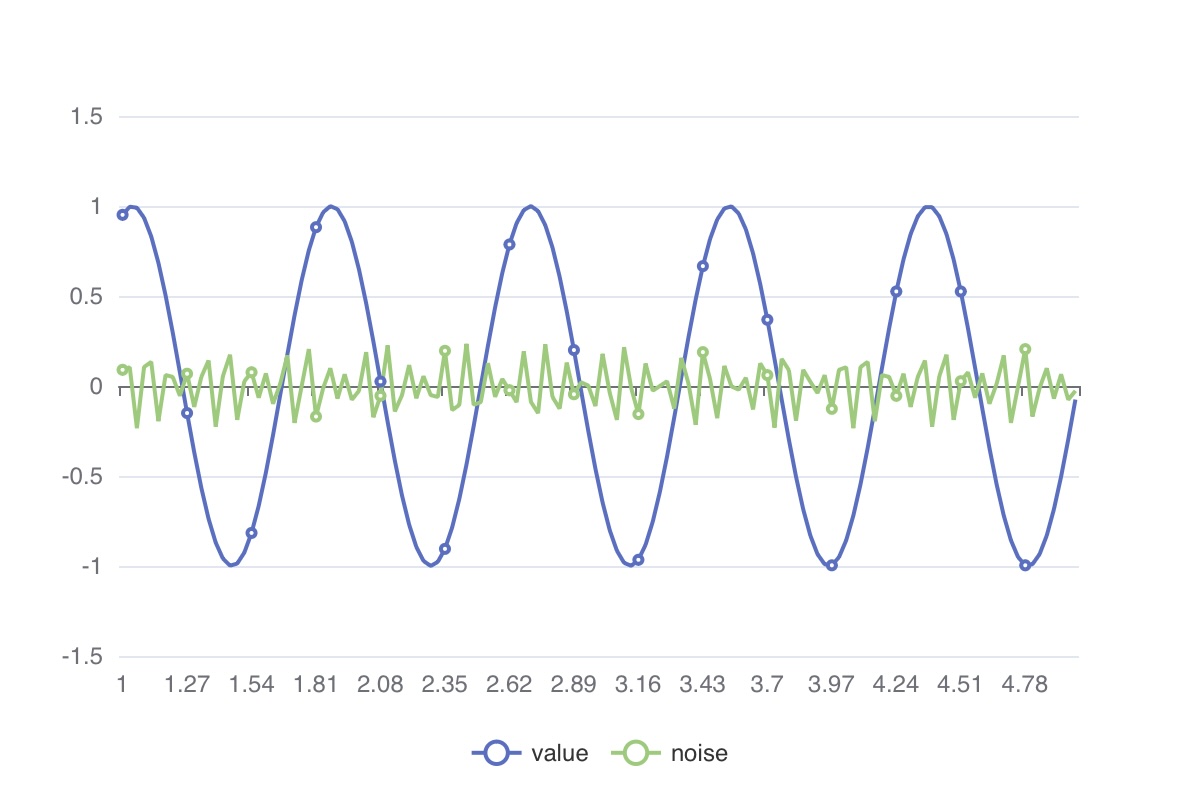
)일반적으로 우리가 제거하고 싶은 노이즈는 관측 대상 신호보다 더 높은 주파수를 갖습니다.
SCRIPT({
$.result = { columns: ["val", "sig", "noise"], types: ["double", "double", "double"] }
for (i = 1.0; i <= 5.0; i+=0.03) {
val = Math.round(i*100)/100;
sig = Math.sin( 1.2*2*Math.PI*val );
noise = 0.09 * Math.cos(9*2*Math.PI*val) +
0.15 * Math.sin(12*2*Math.PI*val);
$.yield( val, sig, noise );
}
})
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value" },
{ type: "line", data: column(2), name:"noise" },
],
legend: { bottom: 10 },
})
)FAKE(arrange(1,5,0.03))
MAPVALUE(0, round(value(0)*100)/100)
SET(sig, sin(1.2*2*PI*value(0)) )
SET(noise, 0.09*cos(9*2*PI*value(0)) + 0.15*sin(12*2*PI*value(0)))
MAPVALUE(1, $sig)
MAPVALUE(2, $noise)
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value" },
{ type: "line", data: column(2), name:"noise" },
],
legend: { bottom: 10 }
})
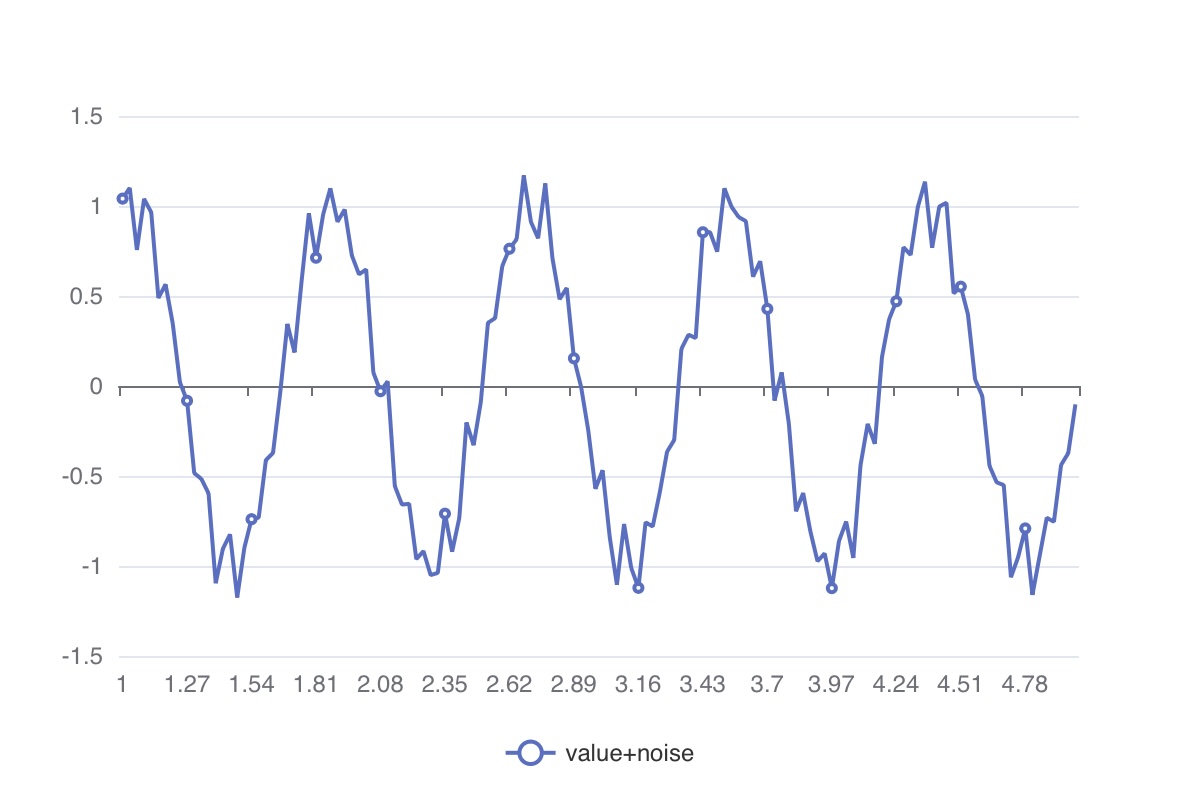
)실제 센서로부터 측정된 값은 위와 같은 노이즈가 섞인 형태가 되며, 분석 과정에서는 이 노이즈를 필터링해 신호를 관찰하고 싶어집니다.
SCRIPT({
$.result = { columns: ["val", "sig"], types: ["double", "double"] }
for (i = 1.0; i <= 5.0; i+=0.03) {
val = Math.round(i*100)/100;
sig = Math.sin( 1.2*2*Math.PI*val );
noise = 0.09 * Math.cos(9*2*Math.PI*val) +
0.15 * Math.sin(12*2*Math.PI*val);
$.yield( val, sig + noise );
}
})
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value+noise" },
],
legend: { bottom: 10 },
})
)FAKE(arrange(1,5,0.03))
MAPVALUE(0, round(value(0)*100)/100)
SET(sig, sin(1.2*2*PI*value(0)) )
SET(noise, 0.09*cos(9*2*PI*value(0)) + 0.15*sin(12*2*PI*value(0)))
MAPVALUE(1, $sig + $noise)
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value+noise" },
],
legend: { bottom: 10 }
})
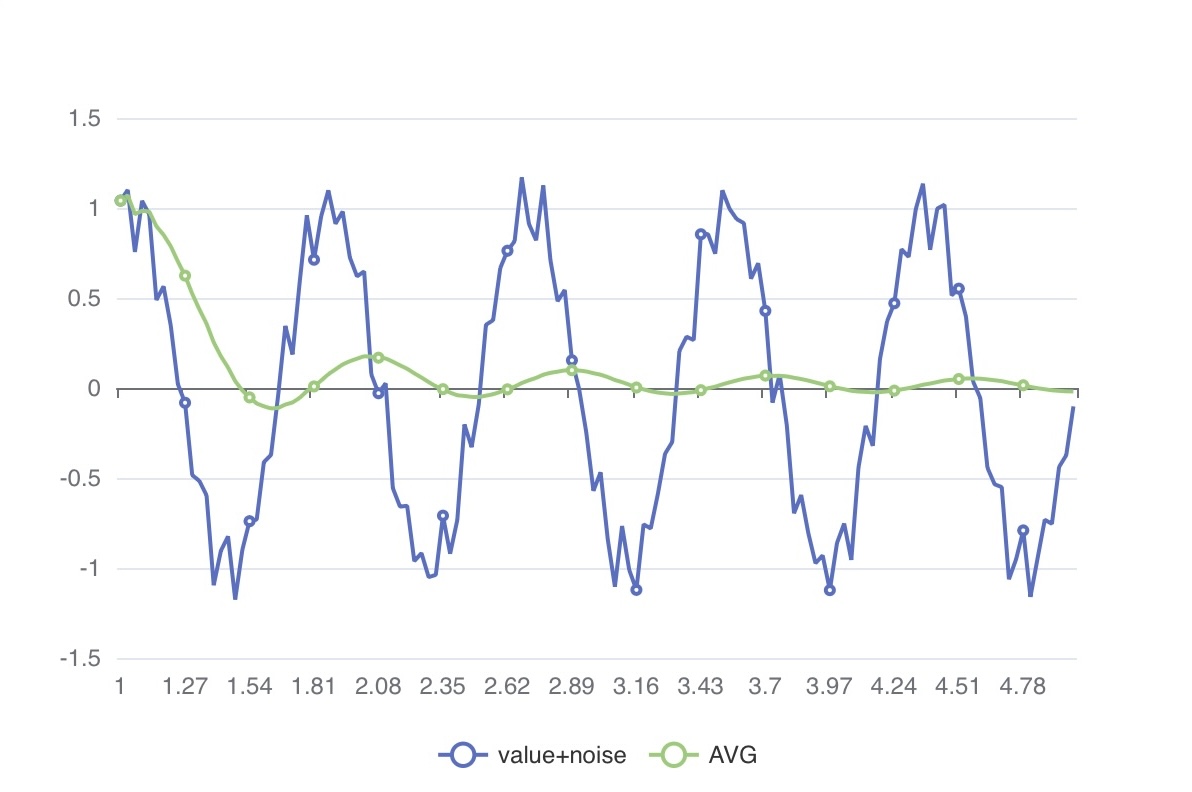
)평균 필터
센서의 영점 보정(zero-point calibration)처럼 연속된 값을 평균하면 노이즈가 줄어드는 효과가 있습니다. 아래 예시는 단순 평균을 적용한 결과입니다.
| |
FAKE(arrange(1,5,0.03))
MAPVALUE(0, round(value(0)*100)/100)
SET(sig, sin(1.2*2*PI*value(0)) )
SET(noise, 0.09*cos(9*2*PI*value(0)) + 0.15*sin(12*2*PI*value(0)))
MOVAVG( value(1), window(10) )
CHART(
size("600px", "400px"),
chartOption({
xAxis:{ type: "category", data: column(0)},
yAxis:{ max:1.5, min:-1.5 },
series:[
{ type: "line", data: column(1), name:"value+noise" },
{ type: "line", data: column(2), name:"avg" },
],
legend: { bottom: 10 }
})
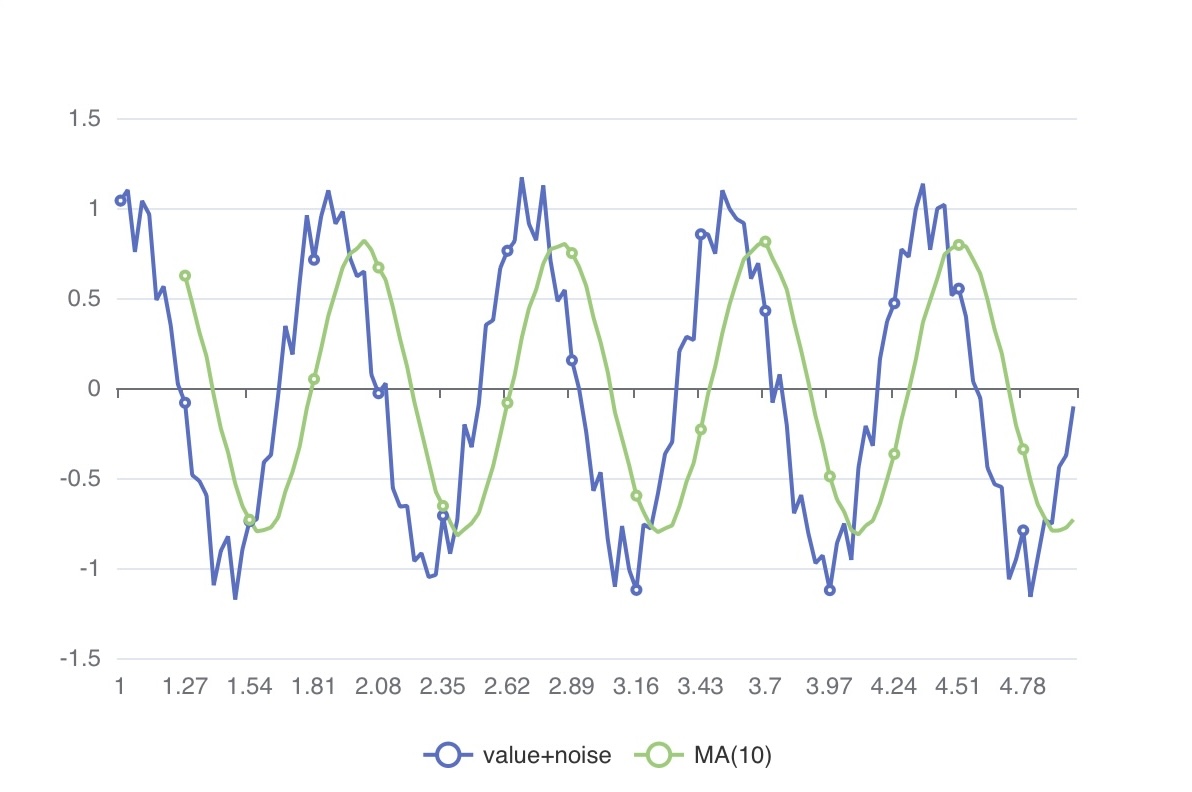
)이동 평균
누적된 전체 샘플에 대해 평균을 계산하는 대신, 고정된 크기의 샘플 구간(window)을 사용해 평균을 계산합니다. 이는 주식 차트에서 흔히 보는 n일 이동 평균과 같은 개념입니다.
| |
| |
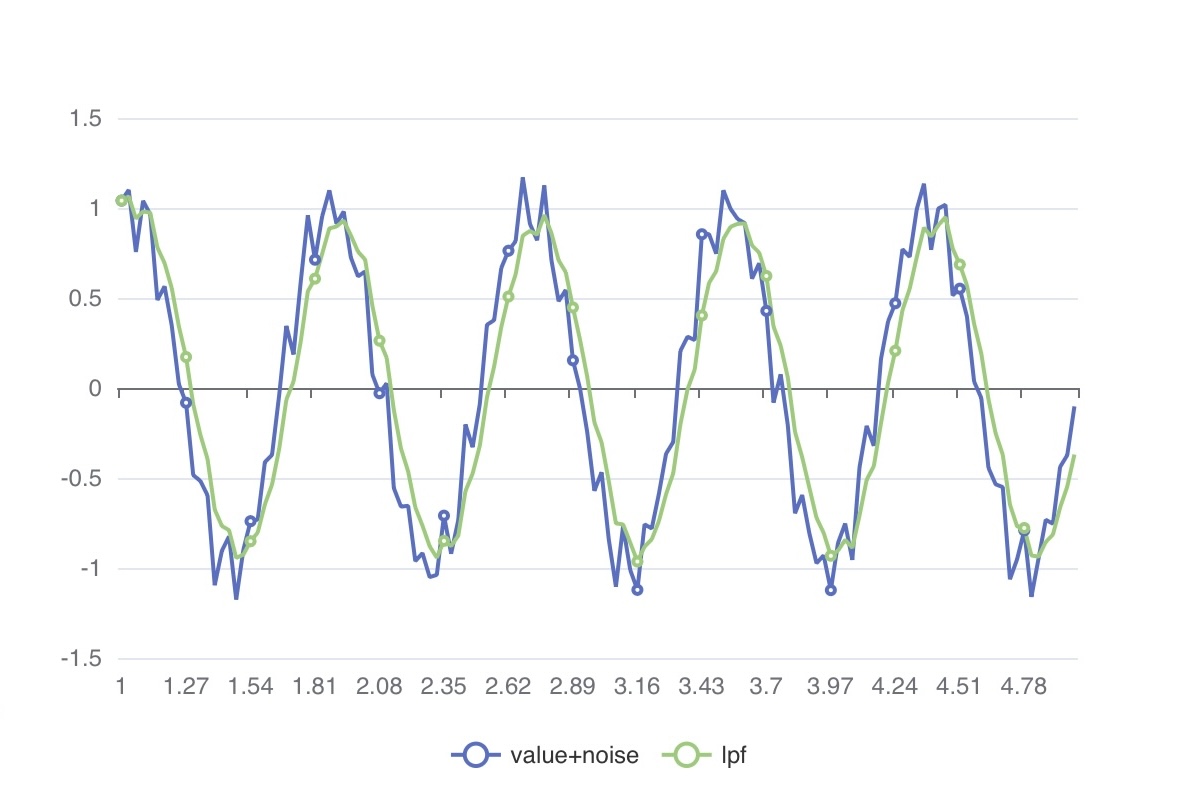
저역 통과 필터
이동 평균은 사용하기 쉽고 이해하기도 쉽지만, 몇 가지 한계가 있습니다.
윈도우 안의 모든 샘플에 동일한 가중치를 적용하므로 최근 추세를 반영하는 속도가 느릴 수 있습니다. 또한 값이 크게 변하는 구간에 비교적 둔감합니다. 이를 보완하기 위해 평균을 계산할 때는 윈도우 안의 최근 값과 오래된 값에 서로 다른 가중치를 주는 방식을 흔히 사용합니다.
| |
| |
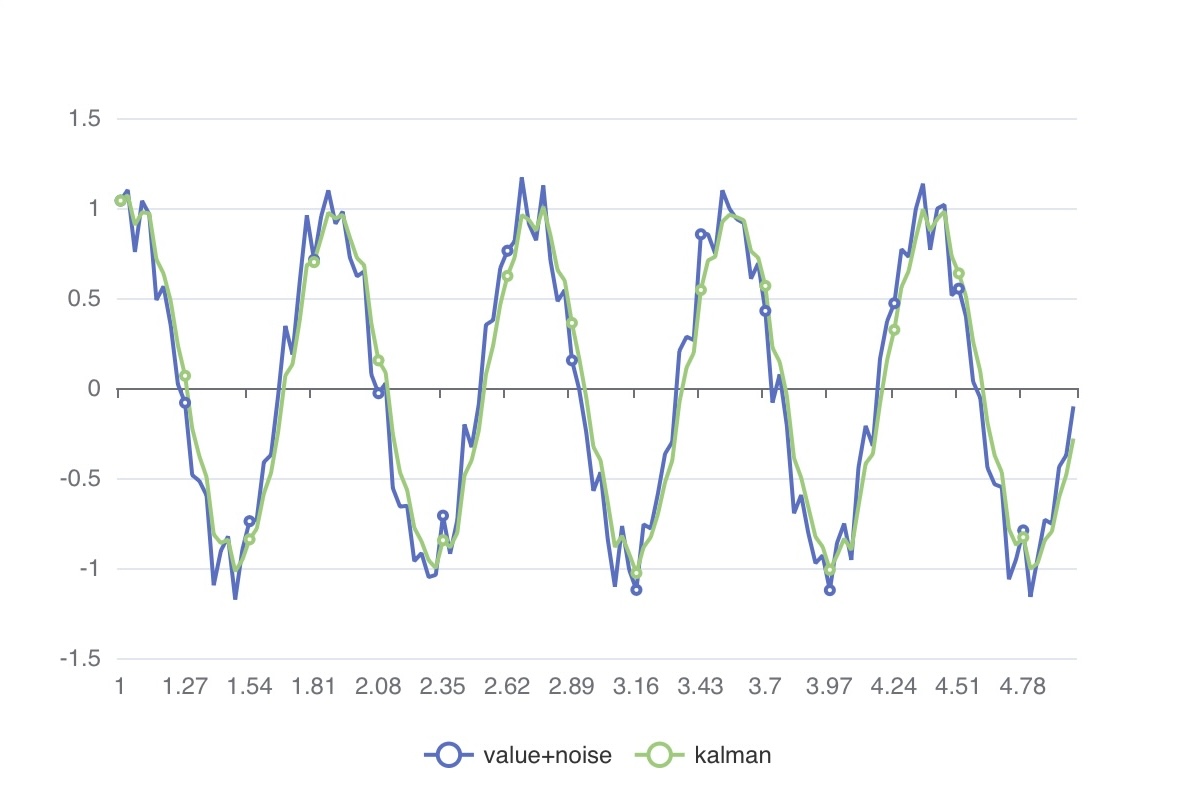
칼만 필터
MAP_KALMAN() 함수의 model() 인자는 수학적 시스템 변수를 나타내는 입력값을 받습니다. 최적의 시스템 값을 어떻게 정할지는 이 문서의 범위를 벗어납니다.
다만 실제로는 TQL에서 간단한 칼만 필터 모델을 쉽게 적용해 보고, 경험적으로 최적의 파라미터를 반복적으로 찾아갈 수 있습니다.
아래 예제는 model 값의 변화가 그래프에 어떤 영향을 주는지 보여줍니다.
여러 model 값을 적용해 보면서 그래프가 어떻게 반응하는지 확인해 보실 수 있습니다.
| |
| |